研究内容
(1) 振動制御に関する研究
・ダイナミックダンパーの開発
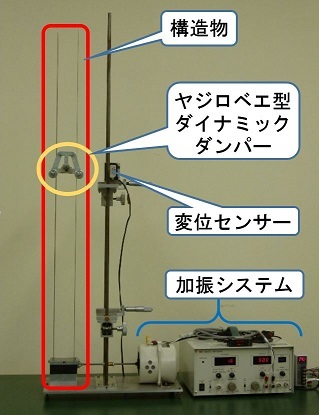
現在、振り子型やばね質量型、液体揺動型などのが実用化されていますが、それぞれに一長一短があります。
本研究室ではこれまでにない新しいタイプのダイナミックダンパーの開発を目指しています。
・柔軟構造物の高速制振位置決め制御
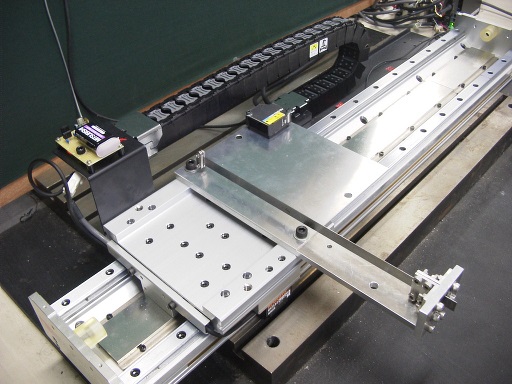
この残留振動を低減する加速度パターンを提案し、その効果を理論と実験によって検証しています。
(2) その他の研究
・エネルギー貯蔵用フライホイールの開発

これを大型化し、エネルギー貯蔵用フライホイールとして実用的な利用を可能とするための基礎研究を理論的・実験的に行っています。