| 2010年 5月 1日 |
主な研究内容
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||
| ifBotをベースとした移動案内ロボットの研究 | |||||
|---|---|---|---|---|---|
|
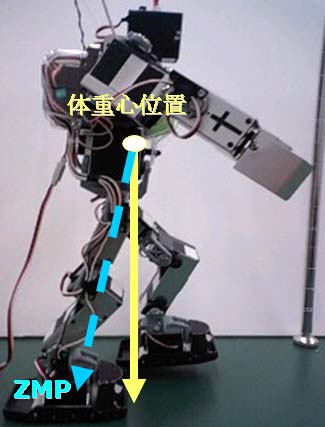
| 2足歩行ロボットの歩行運動特性と機構の研究 | |||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
  |
|||||||||||||
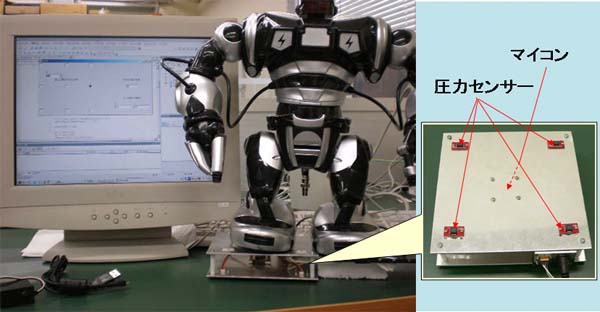
| ロボットへの適用を考えたセンサの研究 | |||||||||||||
 |
|||||||||||||
|
|||||||||||||
|
|||||||||||||
| 卒業研究テーマ | |||||||||||||
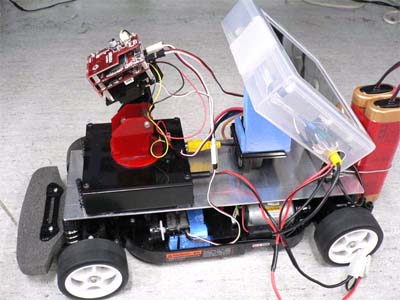
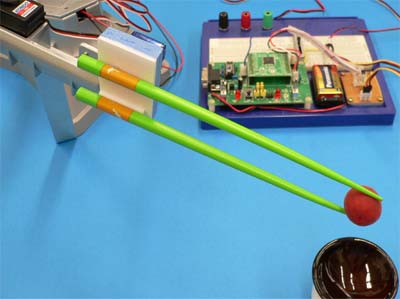
| H18年度 ・ 歩行ロボットの動作制御と運動特性に関する基礎研究 ・ ロボットのための重心移動センサーに関する基礎研究 ・ ロボット移動支援のための画像認識に関する基礎研究 ・ 磁石によるロボット用衝撃吸収機構に関する基礎研究  H19年度 ・ 二足歩行ロボットの歩行運動と機構に関する研究 ・ アームロボットによる把持機構と運動制御に関する研究 ・ 飛行型小型ロボットの製作に関する研究 ・ カメラ画像処理による自動走行ロボットに関する研究
 H20年度 ・ 二足歩行ロボットの歩行運動に関する研究 ・ アームロボットの運動機構とカメラ画像認識に関する研究 ・ 飛行型小型ロボットによる上空画像撮影に関する研究 ・ GPSを応用した移動ロボットに関する研究
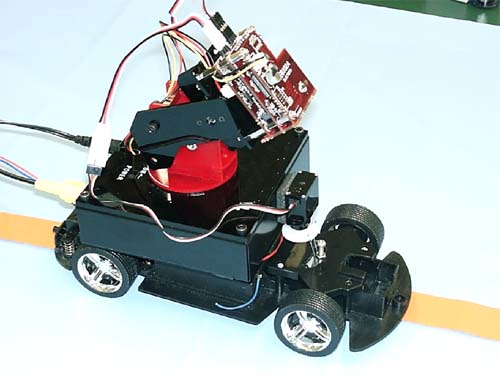
・ 福祉介護支援に適用させたロボット機構と制御に関する研究  H21年度 ・ 飛行船ロボットによる環境モニタリングの研究 ・ カメラ画像による工業製品検査ロボットの研究 ・ カメラ画像によるカラーライントレースカーの研究 ・ LEDを用いた夜間用福祉支援装置に関する研究
・ ifBotをベースとした移動案内ロボットの研究  |
|||||||||||||
| トップページへ |